


Research
An architecture for preemption-resistant control (Ph.D. Defense, Part 2) ¶
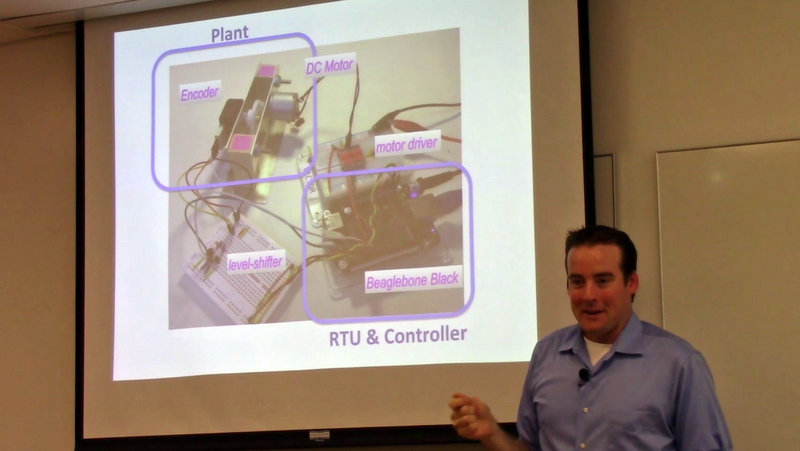
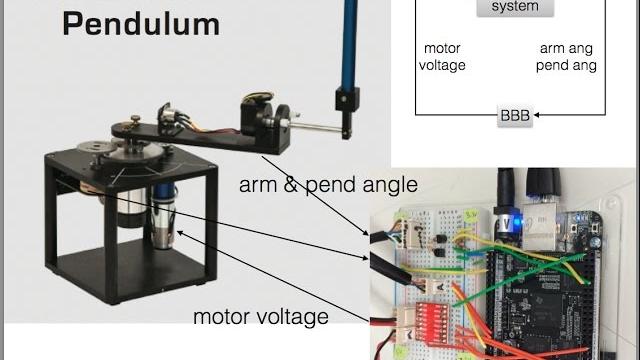
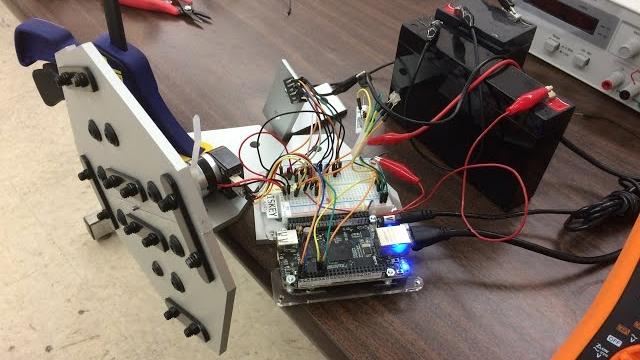
We present a control architecture that allows a controller running on a non-real-time operating system to run with a high degree of determinacy, even in the presence of OS preemption. The main idea is to buffer the sensor measurements and actuator commands on an auxiliary microprocessor called a Real-Time Unit (RTU). The RTU runs independently from the main CPU and so can function even if the main control task is preempted. We implement this on a 1 GHz Beaglebone Black single-board computer using its 200 MHz Programmable Real-time Unit (PRU) as an RTU. We observe that this architecture greatly improves the performance of a simple PID controller in the presence of OS preemption. We presented these results at my Ph.D. defense in January 2018.
Control with minimum energy-per-symbol, and the optimality of event-based control (Ph.D. Defense, Part 1) ¶
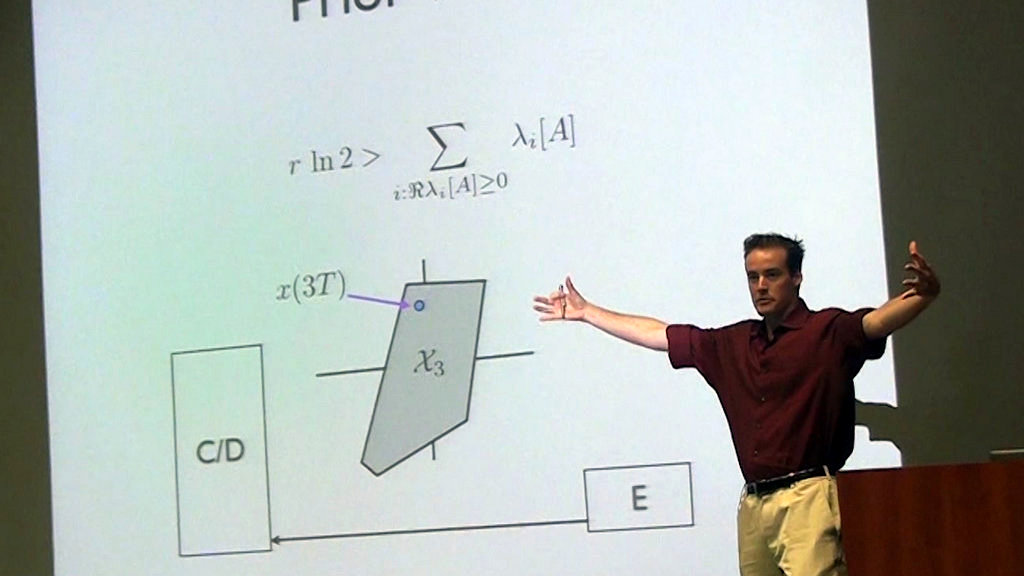
The performance of a control system is often limited by constraints on timing, bandwidth, and energy. This work explores the trade-offs between constraints on these resources, the control system performance, and the system to be controlled. We begin by considering a networked control system in which the sensor sends its measurements to the controller over a limited-bandwidth communications channel. We explore the observation that the absence of communication nevertheless conveys information — i.e., nothing communication-worthy occurred. This suggests that energy (or other resources consumed by communication) could be saved using the timing of messages to transmit information, rather than the normal practice of transmitting data in the messages themselves. We develop a framework to explore this idea and derive a condition for the existence of a stabilizing controller that captures the trade-off between bandwidth, resource consumption, and the unstable eigenvalues of the linear system to be controlled. Next, we use the framework to analyze a family of event-based controllers. We show that these controllers can stabilize a system while consuming resources at a rate that is within 2.5 times the theoretically-minimum rate. We presented these results at the 2015 and 2016 IEEE Conference on Decision and Control, in the May 2017 issue of the IEEE journal Transactions on Automatic Control, and at my Ph.D. defense in Jan 2018.
Minimum-Energy Encoding for Networked Control Systems ¶
Some preliminary results from our work on limited-communication control theory, presented at the 25th Southern California Control Workshop at UC Irvine in Oct 2013.
Introduction to Control Theory & the Beaglebone ¶
To explore the importance of timing in control systems, we implement a pendulum controller on a Beaglebone single-board computer. This video is an overview of the hardware and an introduction to state-feedback controllers. Presented to engineering undergraduates at the IEEE Club at the University of California, Santa Barbara.
How regenerative braking works ¶
Using a simple model for a DC motor, let’s figure out how to use its momentum to recharge a battery. This repo contains the code from the video “How regenerative braking works”.
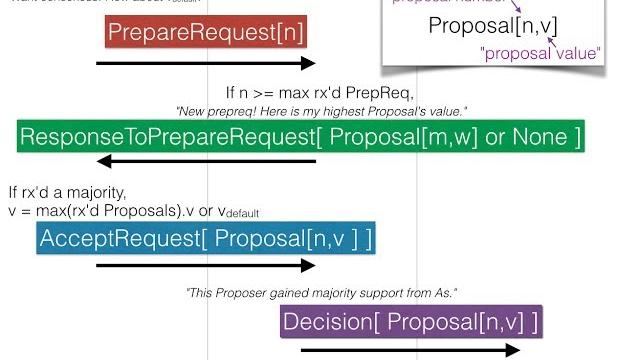
Paxos in Pictures: Lamport's Distributed Consensus Algorithm ¶
Paxos is a computer algorithm to help a network of computers agree on a proposed value. It is hard to understand at first. This video attempts to explain Paxos intuitively yet rigorously. The content comes from Lamport’s 2001 paper “Paxos Made Simple”.
Publications
-
Justin Payne Pearson. Control under energy and time constraints. PhD Thesis, University of California, Santa Barbara, CA, USA, Jan. 2018. [bibtex] [pdf]
-
J. Pearson, J. Hespanha, D. Liberzon. Control with minimal cost-per-symbol encoding and quasi-optimality of event-based encoders. IEEE Transactions on Automatic Control, 62(5):2286—2301, May 2017. [bibtex] [pdf]
-
J. Pearson, D. Copp, J. Hespanha. Preemption-robust control on a non-real-time operating system. Mar. 2017. Submitted to conference publications. [pdf]
-
J. Pearson, J. Hespanha, D. Liberzon. Quasi-optimality of event-based encoders. In Proceedings of the 54th Conference on Decision and Control, Dec. 2015. [bibtex] [pdf]
-
J. Pearson, J. Hespanha, D. Liberzon. Control with Minimum Communication Cost per Symbol. In Proceedings of the 53nd Conference on Decision and Control, Dec. 2014. [bibtex] [pdf]
-
A. Alanwar, F. M. Anwar, Y. Zhang, J. Pearson, J. Hespanha, M. B. Srivastava. Cyclops: PRU Programming Framework for Precise Timing Applications. In Proc. of the 2017 IEEE Int. Symp. on Precision Clock Synchronization for Measurement, Control, and Communication (ISPCS), Aug. 2017. [bibtex] [pdf]